Mobile Robots for Manufacturing
Mobile Robotics for Manufacturing and Inspection in Unstructured Environments;
Mobile Manipulators for Automated Welding Processes
Synopsis: Robotic welding cells trace their origins to the 1960’s. The robotic welding arms used then and those used now in US shipyards have not changed much in size and weight. But today there exists small welding arms that can be mounted on advanced mobile manufacturing platforms and brought to the most common ship welds: collars, clips and erection welds.
Scope of Problem & Support: The problem is universally known. Large structures have never lent themselves well to automation. Robots are most effectively used in factories where the material can be brought to the robots. Ships are built in yards. When automation is used, it is generally used on panel lines where Gantry’s manipulate heavy robotic arms or material handling systems manipulate heavy plate to a stationary robot.
Technical Detail
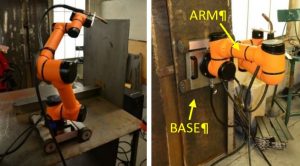
The process goal is advanced mechanized weld capability for joining structural components in ship frames. The proposed CCE-A Robot is a manipulator arm mounted on a mobile base
based on an extension of our high-mobility platform merged with an adaptation of the OUR-1 portable 6 dof (degrees of freedom) arm available through Smokey Robotics to give coordinated motion control. An intuitive operator interface is enabled through onboard
sensing of geometric features in the workspace (bulkheads, stiffeners) to permit torch motion control in a natural fashion – parallel to a feature, in and out from the surface, along
surface intersections etc. Furthermore, the system is man-portable (< 50lbs) and provides extended mobility to operate in flat or vertical configurations and transition between surfaces. The combination of portability and mobility bring high-dexterity torch control to a wide range of spaceship compartments


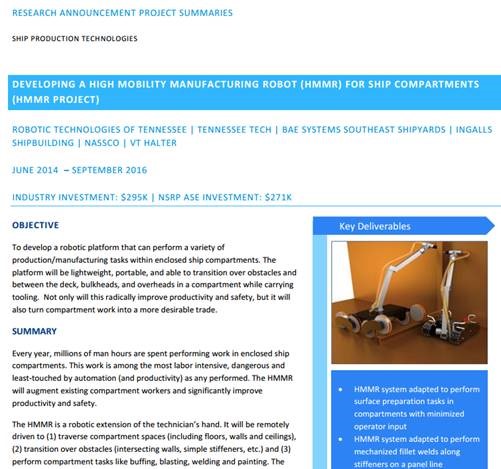
High Mobility Manufacturing Robot:
Mobile Robotic Welding System (MRWS) for Automating Welding Processes in the Shipbuilding Industry

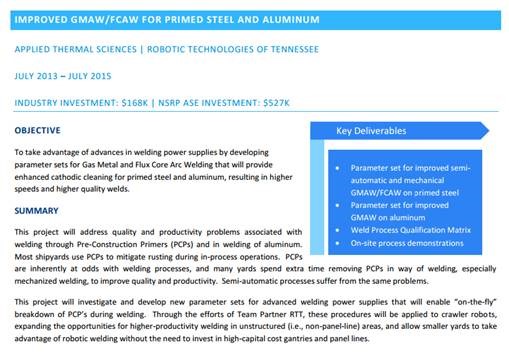
Improved GMAW/FCAW for Primed Steel and Aluminum
High-Mobility Robots for Nuclear Fuel Cask Inspection
The Electric Power Research Institute (EPRI) and other industry stakeholders including the Nuclear Regulatory Commission (NRC), National Laboratories (e.g., Los Alamos National Laboratory, Idaho National Laboratory, etc.), Dry Canister Storage System (DCSS) manufacturers and nuclear power providers have performed evaluations that show that under certain conditions, the DCSS’s used to store spent (used) nuclear fuel (SNF) are potentially susceptible to chloride-induced stress corrosion cracking.
Due to the lack of a permanent repository facility, DCSSs will need to be utilized for longer periods than their original licensed design life, at their existing independent spent fuel storage facilities (ISFSIs) or at an interim site. With this new time frame in mind, the NRC must license and renew licenses at these locations. To do so, the NRC will require that the facilities perform inspections according to codes and standards that are in process. Currently, there are no generally accepted (and preferable) audit protocols or aging canister management standards in place that account for current realities[1].
EPRI is addressing a variety of ways to support DCSS inspections. In 2014, EPRI worked with Robotic Technologies of Tennessee (RTT) on robotic delivery systems for NDE equipment under Agreement No. 1003313. This Agreement was designed to create a “proof of concept” ROV to determine if an ROV could be designed, built and tested that met the requirements of that Agreement.
[1] The NRC has approved a 40-year license renewal for the AREVA TN NUHOMS® dry-cask independent spent fuel storage installation at Exelon Generation’s Calvert Cliffs Nuclear Power Plant that includes an aging management plan for canisters. However the process approved here involves activities that many hope can be eliminated or minimized (i.e., removing the caps on DCSS).
High Capability Portable Foreign Object Debris (FOD) Removal System for Naval Aircraft
Robotic Technologies of Tennessee (“RTT”) has been tasked with developing a multimodal approach to remediating foreign object debris (FOD) in three areas: (1) parkways and ramps; (2) hangers and (3) engine areas.
Advancing Precision Manufacturing in Non-Factory environments with Low-Cost Positioning Sensor
Mobile Robot for HLAW (Hybrid Laser Assist Welding)
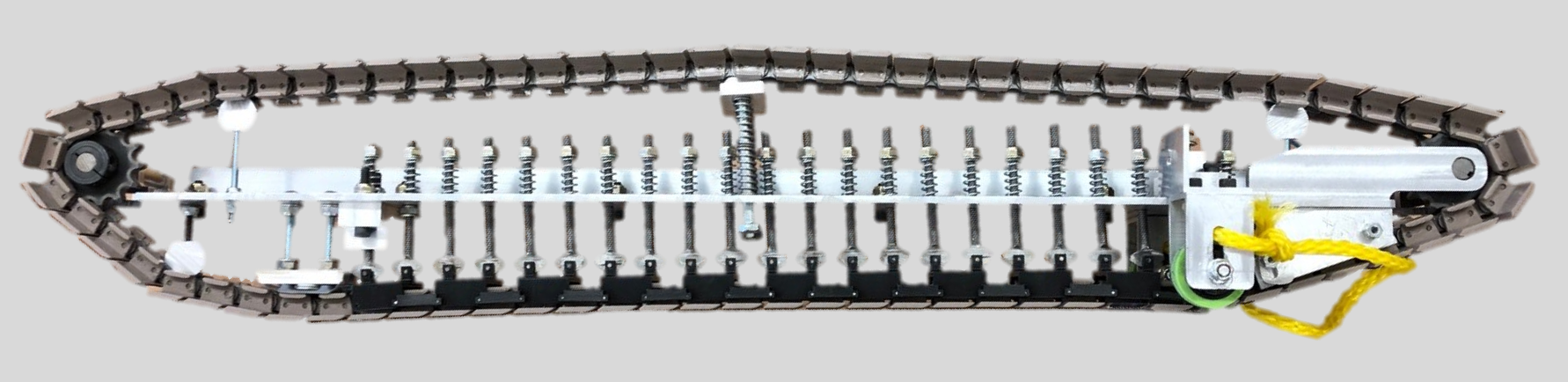
Our lab has been developing robots for mobile inspection and manufacturing applications for over fifteen years, resulting in a climbing mobile robotic system capable of supporting metal joining operations based on GMAW (Gas Metal Arc Welding) processes. This system provides position tracking on the order of 0.050 inches at travel speeds on the order of 20 inches per minute. These systems are capable of traversing climbing surfaces at much higher speeds of 300 inches per minute or greater. However, at such speeds the current design does not provide a stable, controllable path required for many manufacturing operations. This document will discuss the technology developed required to push the operational capabilities of our climbing class platforms significantly higher to a precision of 0.010 inches at travel speeds on the order of 100 inches per minute or greater. Such a development would result in a mobile, robotic HLAW system suitable for high performance welding (hi productivity/efficiency) in unstructured environments. In recent years, significant technology has been advanced in laser welding, resulting in commercially available HLAW systems provided by several companies specializing in welding integration equipment (examples include ESAB, Lincoln, IPG). The HLAW systems are particularly well suited for manufacturing in unstructured environments because they are robust to large tolerances in the fit-up process but is significantly limited by available motion control environments (fixed base robots, gantry-mounted robots). These represent 1) large initial investment and 2) no- on-site manufacture, 3) limits in size and scope of manufacture process (must move the part to the tool rather than the tool to the part). Mobile, non-holonomic systems present a transformative approach to enable this manufacturing technology.
Dry Adhesive Mobile Robot for High-Payload Applications
Many industrial applications require robots to scale and inspect non-ferrous structures, such as those made from, or lined with, aluminum, acrylic, and glass surfaces. On these surfaces, magnetic attachment methods can not be used. To resolve this issue, TTURobotics has developed a mobile climbing platform that attaches to smooth walls with dry adhesives. Using a patented load-distributing suspension, the roughly 8 kg (18 lb) robot is able to carry an additional 32 kg (70 lb) of external payload – approximately 25 times more than any existing dry adhesive climbing robot to date. This impressive results allows this platform to be used in most industrial applications requiring on-board equipment.