Socially-Aware Path Planning for a Flying Robot
in Close Proximity of Humans
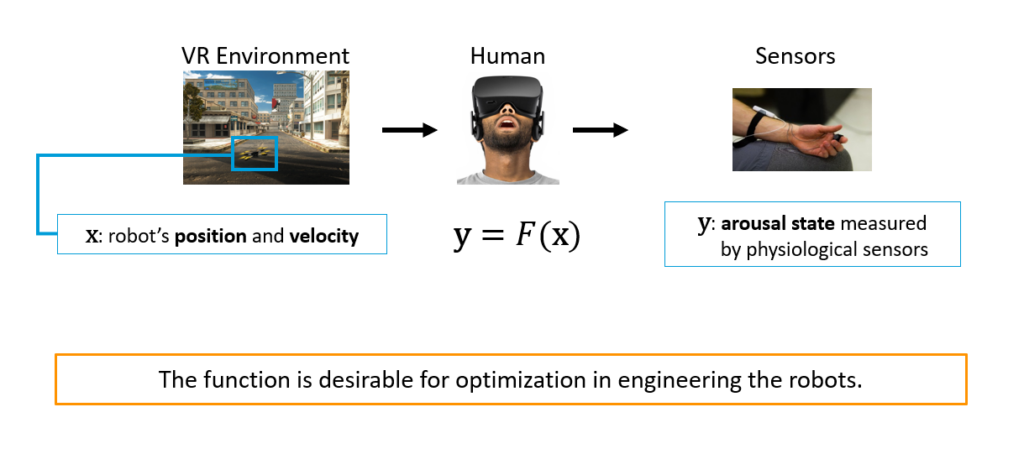
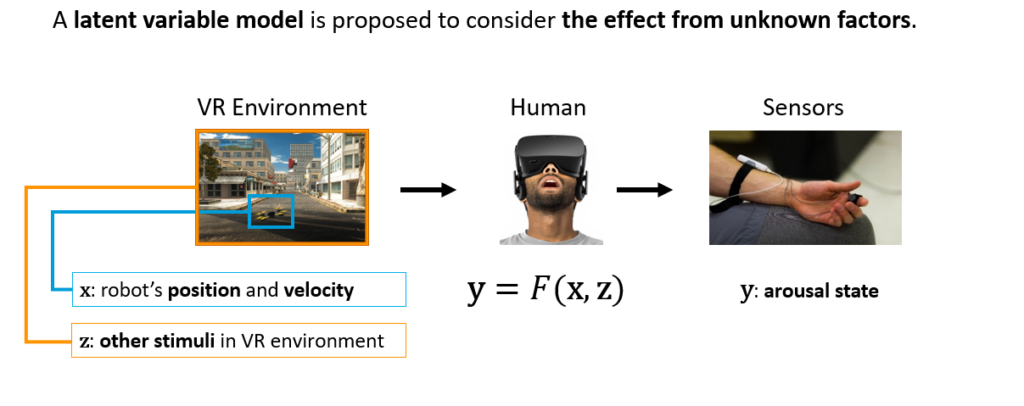
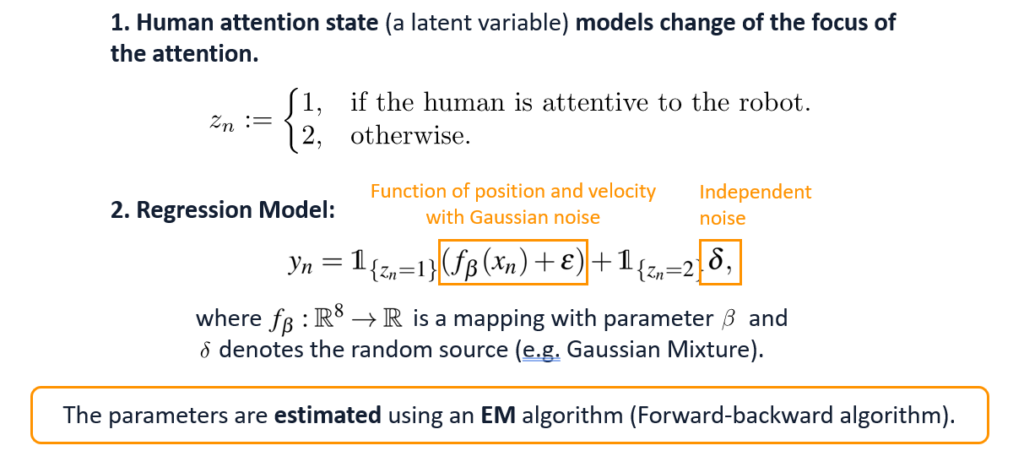
We present a motion planning framework for a cyber-physical system (CPS) consisting of a human and a flying robot in vicinity. The motion planning of the flying robot takes into account of the human’s safety perception. We aim to determine a parametric model for the human’s safety perception based on test data. We use virtual reality (VR) as a safe testing environment to collect safety perception data reflected on galvanic skin response (GSR) from the test subjects experiencing a flying robot in their vicinity. The GSR signal contains both meaningful information driven by the interaction with the robot and also disturbances from unknown factors. To address the issue, we use two parametric models to approximate the GSR data: (1) a function of the robot’s position and velocity and (2) a random distribution. Intuitively, we need to choose the more likely model given the data. When GSR is statistically independent of the flying robot, then the random distribution should be selected instead of the function of the robot’s position and velocity. We implement the intuitive idea under the framework of HMM estimation. As a result, the proposed HMM-based model improves the likelihood compared to the Gaussian noise model which does not make distinction between relevant and irrelevant samples due to unknown factors. We also present a numerical optimal path planning method that considers the safety perception model while ensuring spatial separation from the obstacle despite the time discretization. Optimal paths generated using the proposed model result in reasonable safety distance from the human. In contrast, the trajectories generated by the standard regression model with the Gaussian noise assumption, without consideration of unknown factors, have undesirable shapes.
Flying robot observed in the VR environment
(an illustration video at https://youtu.be/XnaXzdHlxUA)

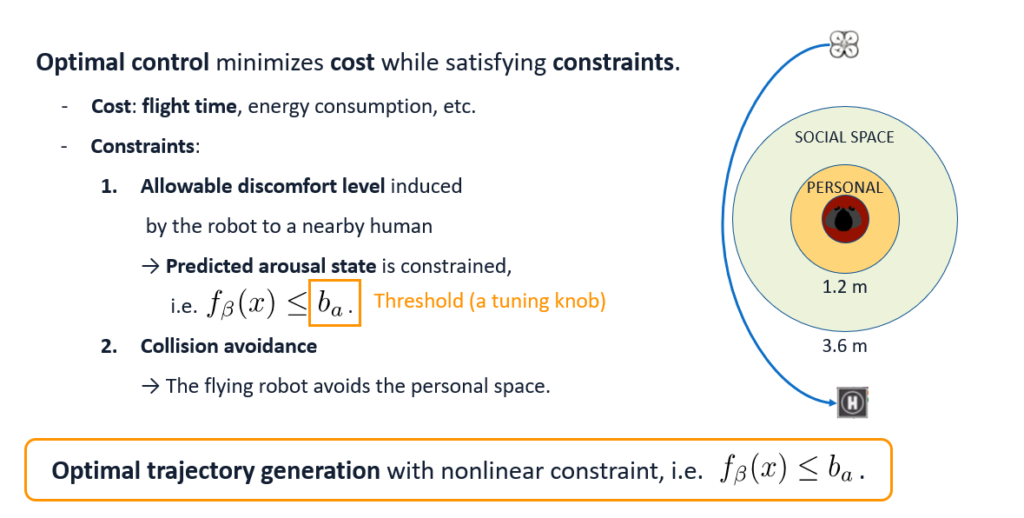
Safety perception model
Unknown factors in the proposed model
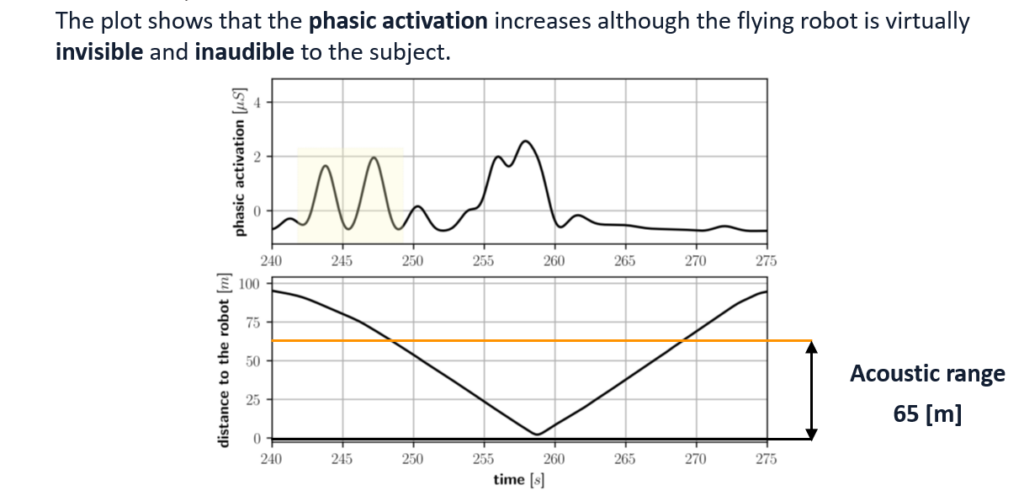
Unknown factors in the proposed model
A hidden Markov model (HMM)
Safety perception model in motion planning
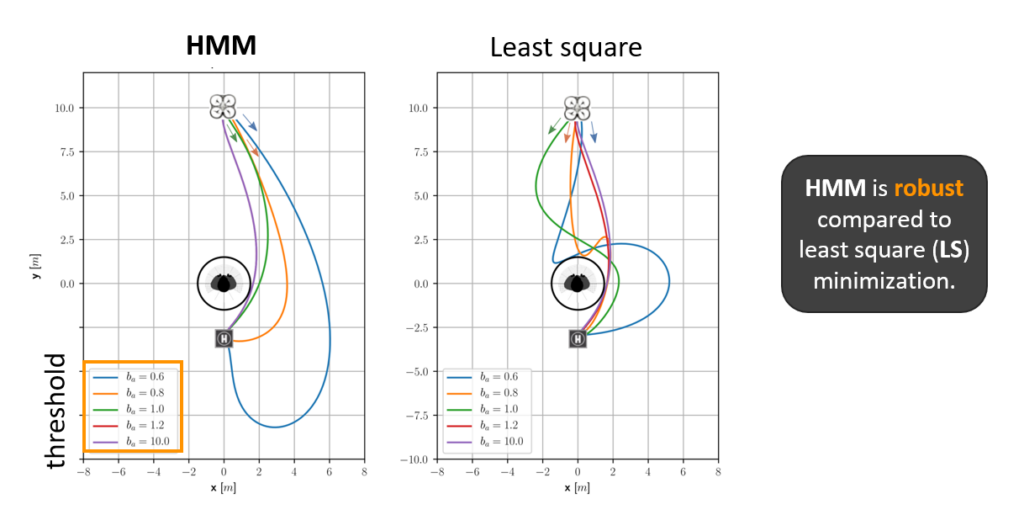
Two perception models: HMM vs. Least squared error
Relevant Paper:
- Yoon, Hyung-Jin, et al. “Socially aware path planning for a flying robot in close proximity of humans.” ACM Transactions on Cyber-Physical Systems 3.4 (2019): 1-24.
- Yoon, Hyung-Jin, et al. “A path planning framework for a flying robot in close proximity of humans.” 2019 American Control Conference (ACC). IEEE, 2019.
- Widdowson, Christopher, et al. “VR environment for the study of collocated interaction between small UAVs and humans.” International Conference on Applied Human Factors and Ergonomics. Springer, Cham, 2017.