Learning and Control for Autonomous Systems Laboratory (LCASL)
Selected Research Topics
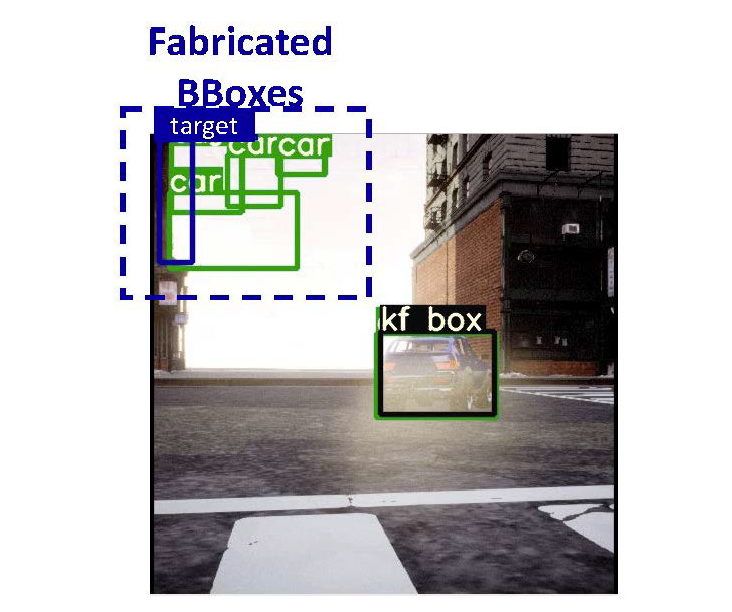
Cyber Attack to Machine Learning Model
Stealthy cyber attack is a critical issue for Cyber-Physical Systems. We study such attack methods to robustify CPSs.
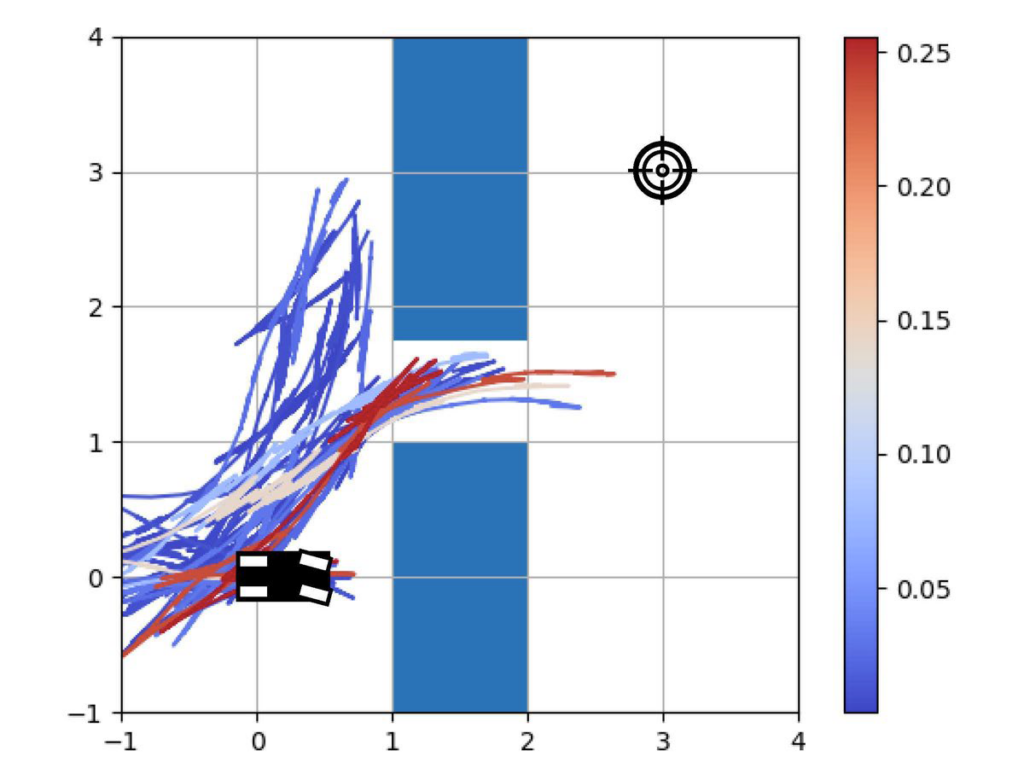
Stochastic Methods for Control
Accessible parallel computing devices (e.g., GPU) enables applications of stochastic methods in decision-making and control.
VR Simulation for Autonmous Vehicle
Photo Realistic Simulation using VR/Game engine has become an industry standard for developing and testing autonomous vehicle.

Socially Aware Path Planning
We present a motion planning framework for a cyber-physical system (CPS) consisting of a human and a flying robot in the vicinity.

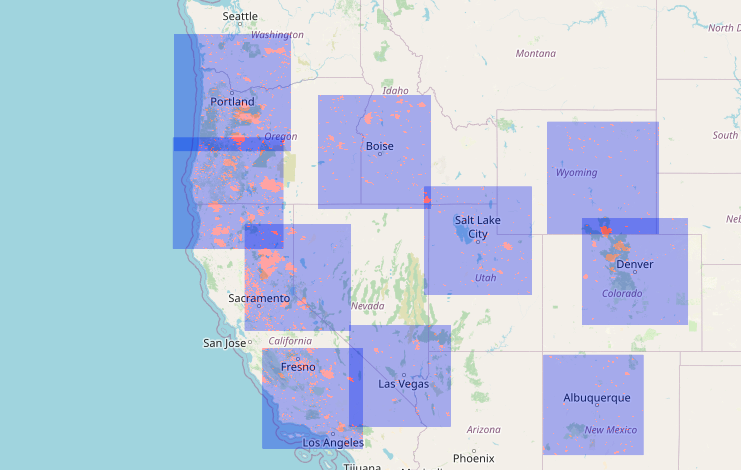
Wildfire Prediction
Increasing wildfire risk in Northern California motivated us to study estimation methods for wildfire prediction.
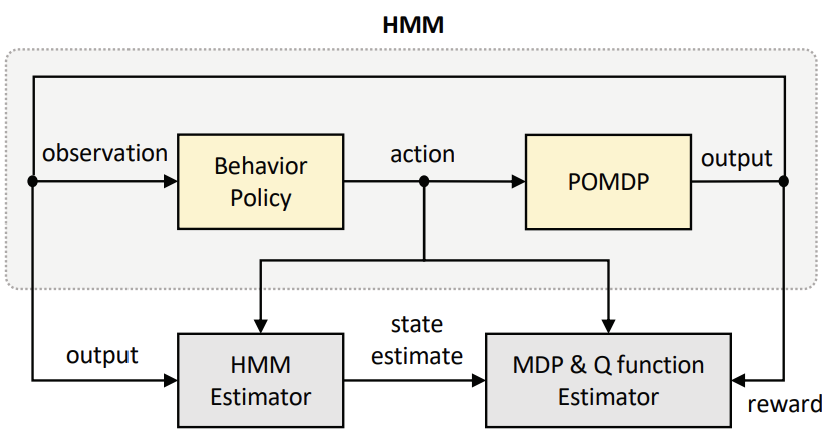
Hidden Markov Model base Reinforcement Learning
Decision-making problems in real-world are often partially observable, and dynamic models of the environments are typically unknown.
Favorite Quotes
The two sages saved me during my Ph.D. when I struggled to understand mathematics. I gave up trying to understand everything at once but started to get familiar with it. I also worked hard to find connections between the mathematical tools and my experience so that they could be useful.
The theory of probabilities is at bottom nothing, but common sense reduced to calculus; it enables us to appreciate with exactness that which accurate minds feel with a sort of instinct for which ofttimes they are unable to account.
– Pierre-Simon Laplace –